
Lunar Helium-3 (3He) mining has the potential of addressing the energy and environmental challenges on Earth. As an essential fuel of future nuclear fusion reactors, 3He is extremely rare on Earth, with currently less than 2 kg/year production in the US, but is much more abundant on the lunar surface, with an estimated reserve of over one million tons. Just 40 tons of 3He, combined with deuterium, a resource available on Earth, could meet the current annual energy need of the U.S.
Mining 3He on the Moon would be quite different than traditional mining process on Earth. Over the time, 3He, along with other volatiles, were implanted into the lunar regolith by the solar wind. This means that surface mining operations would need to cover vast areas at shallow depths. Agitation to the regolith will lead to a significant release of the volatiles, which presents both a challenge and an opportunity. Other challenges associated with large-scale space industrialization, such as the limited human presence and the high reliability/autonomy requirements, meaning radically different mining concepts need to be developed.
Inspiration: Vascular plants use roots to anchor themselves, to explore and extract resources from earth, to store nutrients, and to compete with others. The roots grow by producing new cells, which are regulated by both extrinsic and intrinsic stimuli. Sensing of extrinsic factors, such as gravity, barriers, light, air, water, and nutrients, directs roots to grow toward favorable directions. Hormones (i.e., intrinsic stimuli) such as Cytokinins and Auxin (with often opposite effects), as a part of both local and long-distance signaling, also help coordinate the root development. The plant roots are time and real-world tested designs for functionality, intelligence, and resilience.
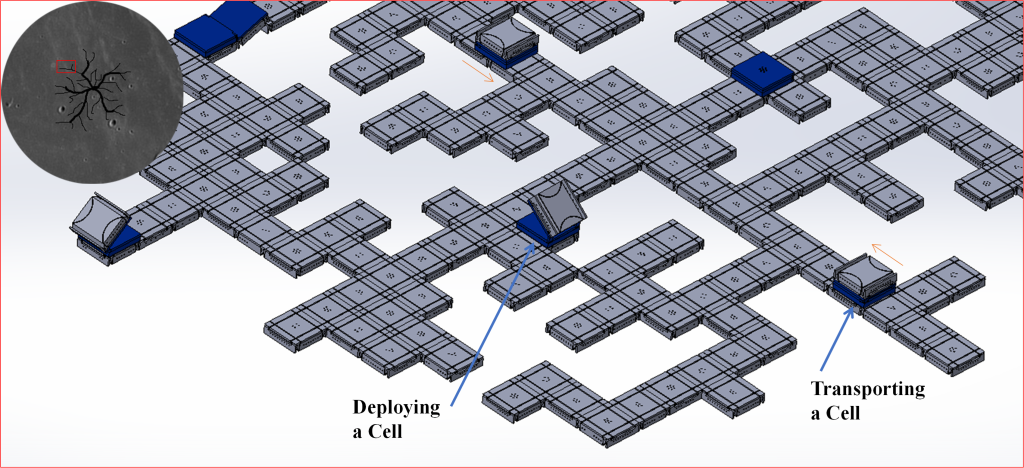
Vision: Entering rootbots, sprawling networks of robot organisms, for performing planetary resource extraction tasks at an unprecedented scale in the second half of the 21st century. A rootbot will be made of modular and interlocking smart components called the cells. Each cell interacts with the environment and makes its own decisions, influenced by local stimuli and decisions of nearby cells. One important decision to be made is whether for a cell to stay in place or relocate. If a cell decides to move, it will wait for a mobile agent, called a transporter, to come by and pick it up. Traveling only on top of the existing “root” network of cells, the transporters carry cells and deploy them in places where they desire. With two decentralized and interacting robot swarms (i.e., the cells and the transporters), a rootbot can grow like a plant root for exploring and exploiting favorable conditions.
Ok, the discussions above were modified from an unsuccessful NASA NIAC proposal. Feedback from NASA? “Overall, while there were many interesting aspects suggested, the proposal overreached without enough justification for any one concept, especially given the scale proposed.”